Intro
temi is a telepresence assistant with
autonomous mapping, navigation, and obstacle avoidance. Interacting with it can be
made via the full HD 10-inch touchscreen or
hands-free with the power of voice.
In addition, temi has a companion app that
lets you remote drive temi and makes video
calls to other temi owners.
autonomous mapping, navigation, and obstacle avoidance. Interacting with it can be
made via the full HD 10-inch touchscreen or
hands-free with the power of voice.
In addition, temi has a companion app that
lets you remote drive temi and makes video
calls to other temi owners.

Context/Specs
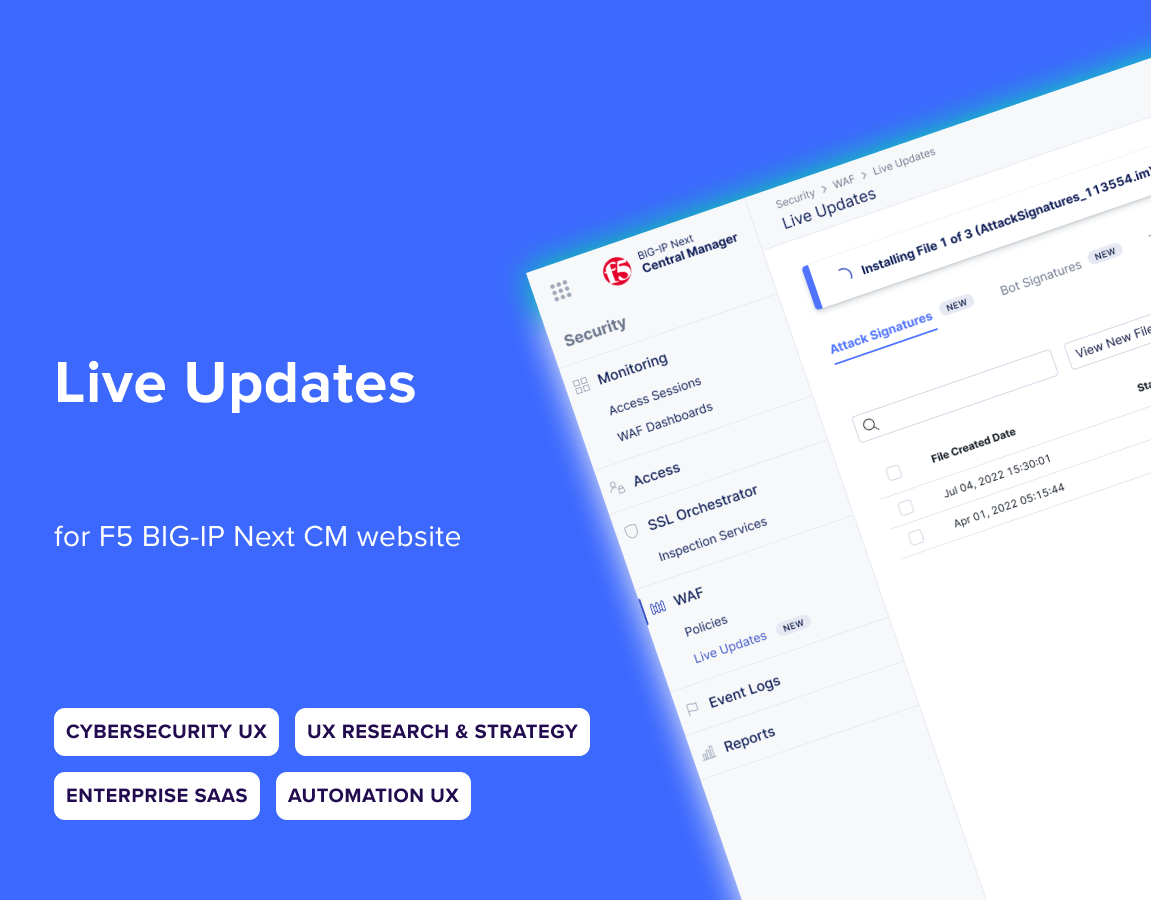
Designing Map-Based Navigation for temi
Giving users direct control of robot movement through an interactive map
Giving users direct control of robot movement through an interactive map
This feature lets users control and navigate their temi robot directly from a map interface on the Temi Center website. The website supports businesses managing a fleet of robots through centralized tools like bulk updates and behavior settings.
I led the design and behavior definition for this feature, working closely with R&D, front-end, and back-end teams. My focus was on creating an intuitive and actionable navigation experience.
Goals:
Design a map-based interface that allows users to move temi accurately and confidently.
Design a map-based interface that allows users to move temi accurately and confidently.
Success Metrics:
• Users can identify how to initiate navigation from the map
• Users understand how temi responds to map-based commands
• Users can identify how to initiate navigation from the map
• Users understand how temi responds to map-based commands
Timeline: ~2 months
Constraints: Ensure the feature fits into the existing platform structure and supports real-time control
Constraints: Ensure the feature fits into the existing platform structure and supports real-time control
The role of the Control feature at temi
This is the first time in temi products that a user can press on the map, and temi will go there. Since it's web, many other features can be added, such as the ability to turn on the camera while temi is driving, edit its map on the fly, etc.
Research Steps & Challenges
Competitive Analysis
I researched products that have similar functionality and purpose. Like smart vacuum cleaners;
I've identified which features are the most attractive and in demand.
I've identified which features are the most attractive and in demand.

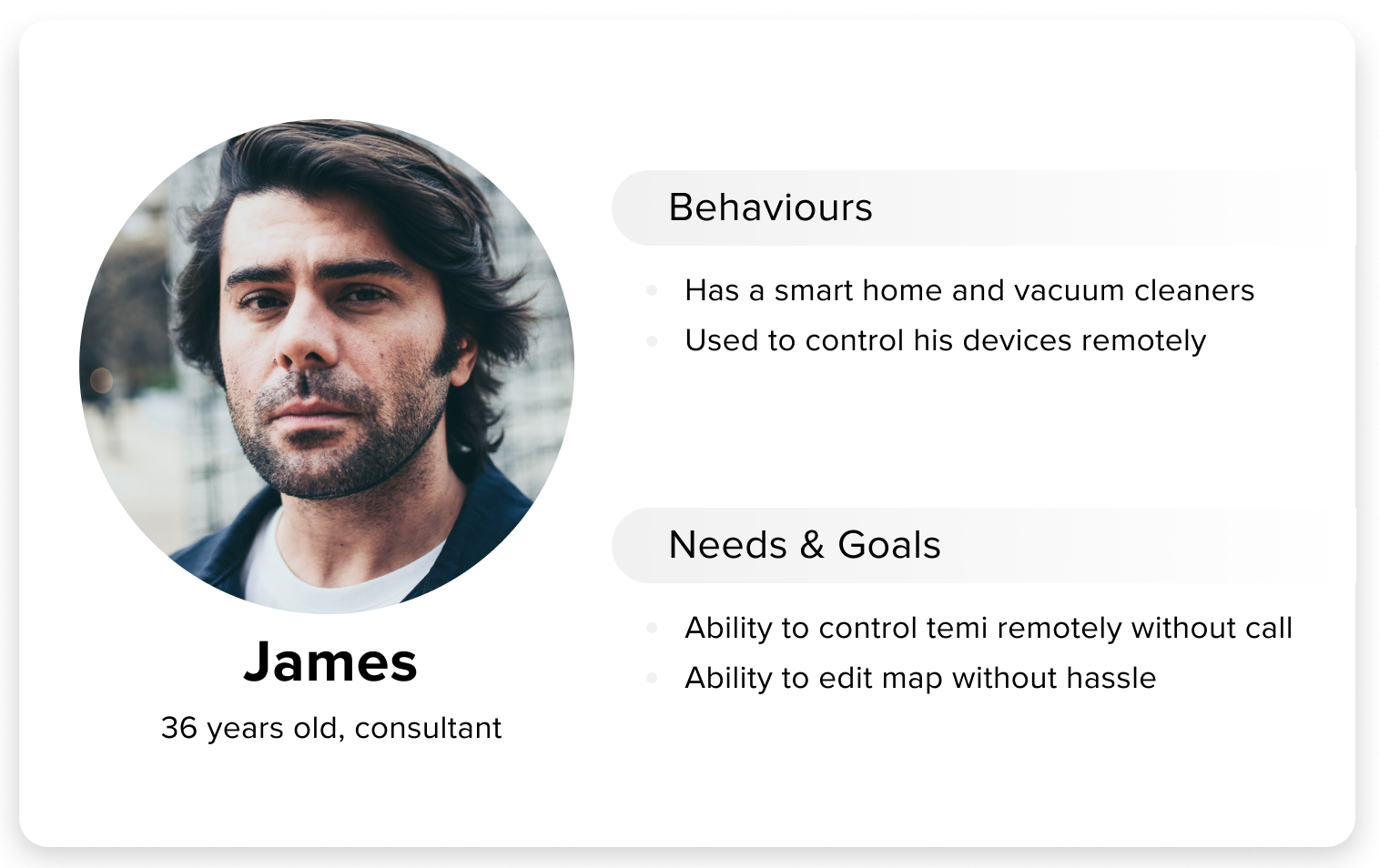
Persona (Talk to potential users)
Based on the information gathered in interviews, I formed a persona. I have a clear understanding of what our users want, which will enable me to initiate the design process.
MVP
1. Control temi:
a. Send to X&Y position
b. Save location
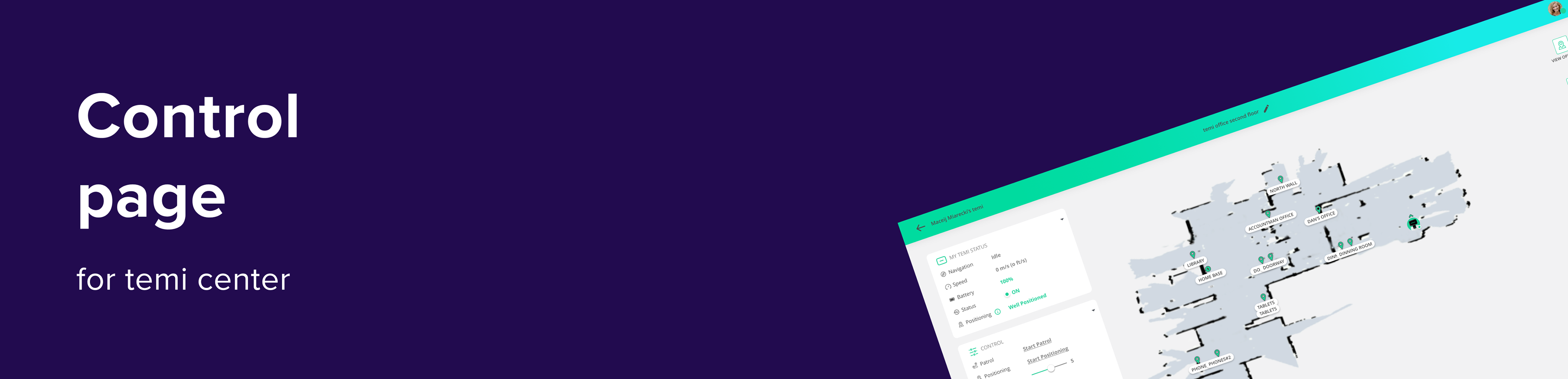
2. Statuses:
* Navigation, Speed, Battery, Power, Positioning
3. Control shortcuts:
a. Start Patrol
b. Start Positioning
c. Set Vol level
d. Restart
e. Turn OFF
4. Start Video Call
5. Edit the map
6. Map actions: zoom, hide map elements
a. Send to X&Y position
b. Save location
2. Statuses:
* Navigation, Speed, Battery, Power, Positioning
3. Control shortcuts:
a. Start Patrol
b. Start Positioning
c. Set Vol level
d. Restart
e. Turn OFF
4. Start Video Call
5. Edit the map
6. Map actions: zoom, hide map elements
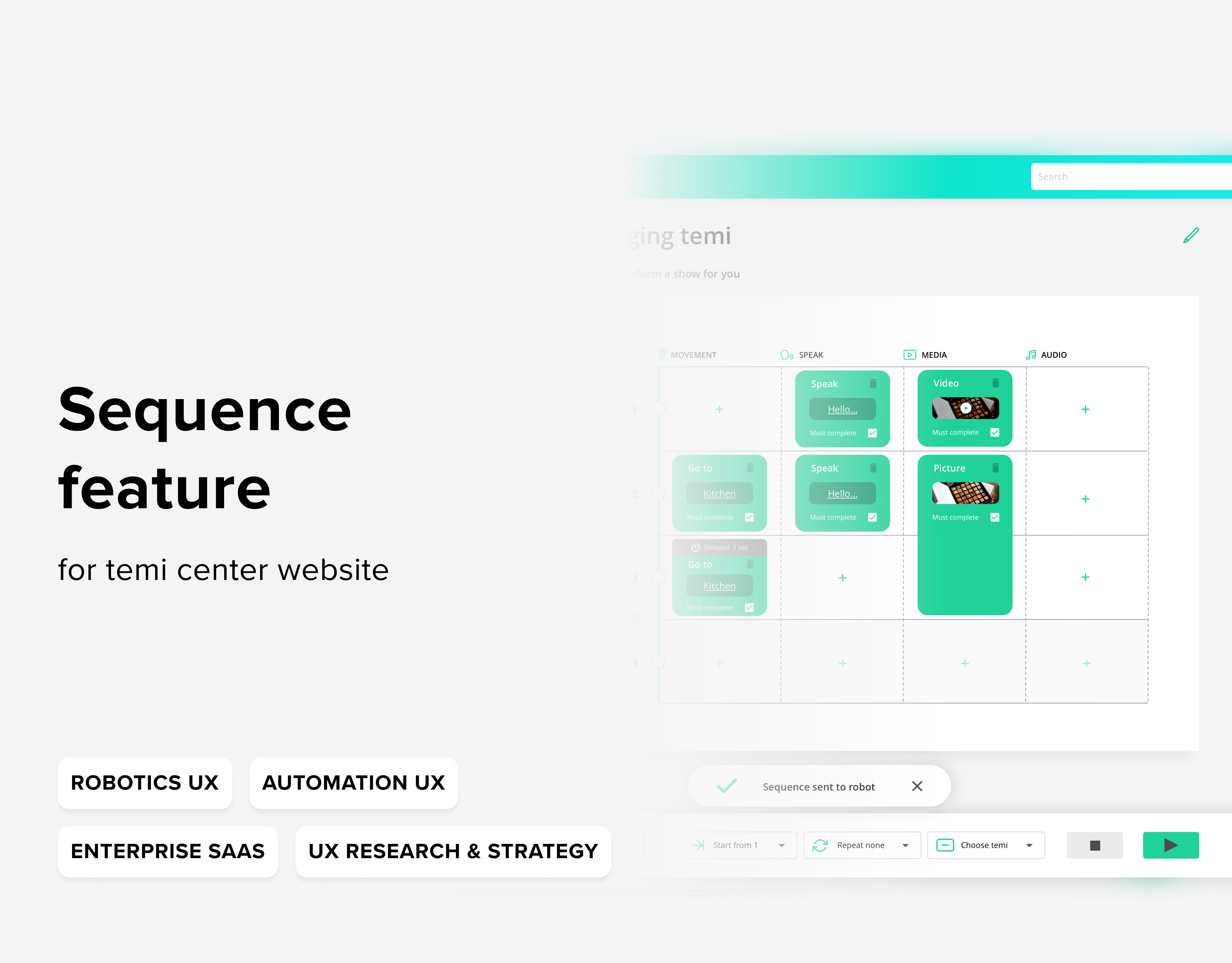
Design
Design Iterations
Final Design
Control Screen without the user interacting with it
The user edits the map
The user sends the robot to the location
The user makes a video call while controlling the robot
The user launches the tutorial
Example for micro-interaction

Conclusions
Product Impact
• The control feature is easy to use and intuitive, though some technical limitations in map design remain
• It’s one of the most-used features within Temi Center
• Analytics and support feedback confirm strong user adoption and success
• It’s one of the most-used features within Temi Center
• Analytics and support feedback confirm strong user adoption and success
Key Learnings from Research
• Users expected real-time feedback when sending movement commands
• Initial destination selection was a common friction point
• Visual confirmation increased user confidence in temi’s path
• Initial destination selection was a common friction point
• Visual confirmation increased user confidence in temi’s path